Robot Pathfinding
This is my approach for navigating a robot through a simulated Vex robotics competition arena.
Implementation:
Invisible colliders were placed to add an extra buffer to the walls. This was to prevent robot collision, keep nodes from generating too close to the walls, and functioned to obstruct the robot-scout line-of-sight (for improved navigation).
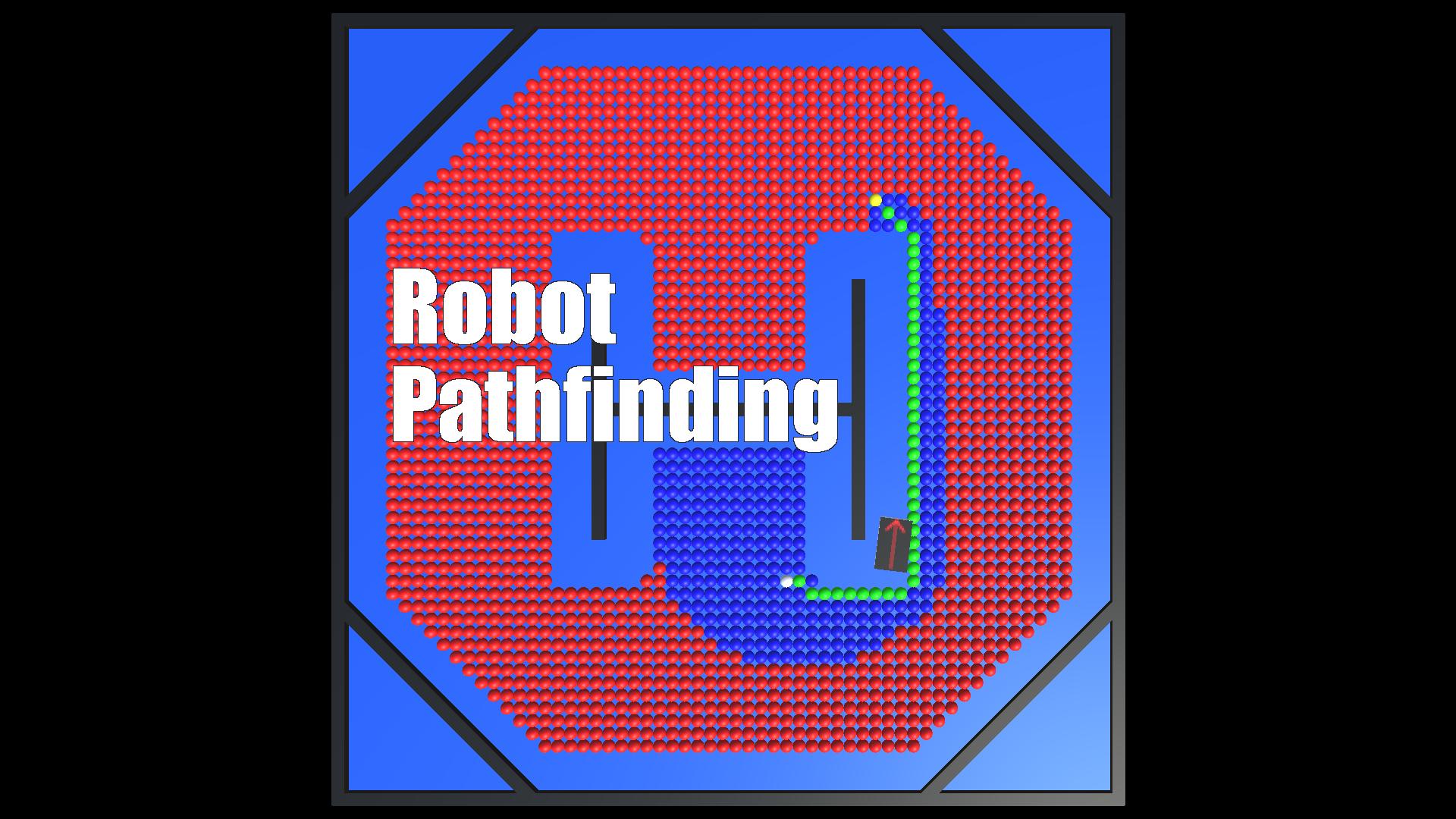
Upon startup, nodes are generated throughout the arena in a tightly-packed mesh. Nodes generated within the collider zone are removed. These nodes change color depending on how they have been interacted with.
When prompted, random "start" and "end" nodes are generated, and A* is used to find the path between both nodes (the distance to end node is used as the heuristic function). A look-ahead scout was implemented to smooth out the robot movement--when the robot loses sight, the scout stops and waits for the robot to catch up. This ensures the robot reduces excess travel by cutting closer to corners as well as providing smooth and natural turning movements.
Leave a comment
Log in with itch.io to leave a comment.